
We have finalised and sent out our eighth newsletter, containing information on the latest produced deliverables, our demonstration videos, and links to all our software code! You can find it at our website.
New WP5 video about collective perception available!
And as of today, you can find the third WP5 video, this time the second and final part of our series on “Collective Perception for Connected Automated Driving”. Enjoy your view at our videos section.
Posters!
Look at our results in a glance! Transition areas? ODD? Automated driving? V2X communication? What traffic management measures work? And how well do they work? What about the impacts on traffic efficiency, safety, and emissions? Head over to our posters section.
New WP5 video available!
We have published a new WP5 video, this time talking about “Maneuver Coordination for Connected Automated Driving”. Enjoy your view at our videos section.
Demonstrations on the testbed of Lower Saxony
TransAID held a string of demonstrations on the Testbed Lower Saxony. This testbed encompasses sections of the German A2, A7, A39, and A391 motorways as well as parts of the federal and state roads B3, B6, B243, and L295. Furthermore, it also integrates the established routes of the Application Platform for Intelligent Mobility (AIM), which is in operation in the Braunschweig city centre. This enables testing in differing traffic situations and in the transition between different types of road.
Several TransAID use cases have been demonstrated on the testbed in November 2020. Thanks to the ADAC Center for Safe Driving https://www.fsz-hannover.de/ for the great support!
New deliverables!
And as our project comes to a close, we have released a new set of very interesting deliverables for you to download and read!
- D6.2 (Assessment of Traffic Management Procedures in Transition Areas)
- D7.2 (System Prototype Demonstration)
- D8.3 (Guideline and roadmap)
As always, you can find all the other deliverables on our website.
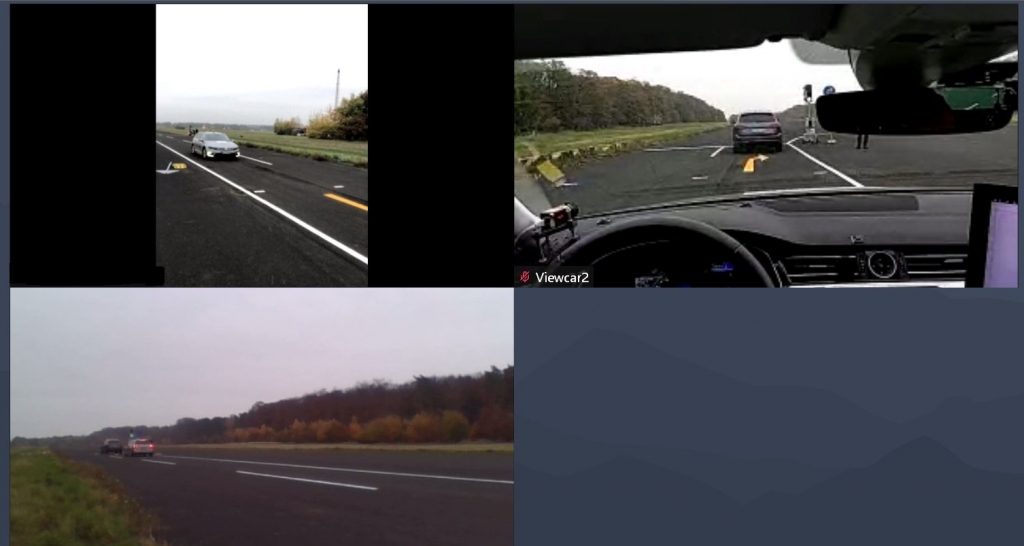
A day of feasibility assessments ends
As the sun was about to leave us and the day came to a close, so did our feasibility assessment on the test track. We ended with use case 1.3, whereby vehicles use the upstream emergency lane to queue for a blocked off-ramp. Our vehicle receives the traffic management information from the road-side unit, and acts accordingly by changing lanes and queueing after the last vehicle.
Live testing of safe spot assignment!
The weather is fine, the hardware is working, the software does its job, and the people look at our automated vehicles!
Real-life feasibility assessment of TransAID’s use cases
Exciting! Today our DLR team is running a real-life feasibility assessment of TransAID’s use cases! We are testing automated vehicles, all V2X communications (with CAMs, DENMs, MCMs, …), testing the ODD boundaries with take-over requests (TORs), transitions of control (ToCs), and minimum-risk manoeuvres (MRMs), all in the scope of traffic management. Everything is streamed live to our consortium partners in Europe!

New paper on Cooperative Perception for CAVs
Congratulations to our colleagues from UMH! They have published their paper “Cooperative Perception for Connected and Automated Vehicles: Evaluation and Impact of Congestion Control” in IEEE Access. Get your free copy here.